>_ Hello, World.
Jimmy Chiun
Research Scientist & AI
Researcher
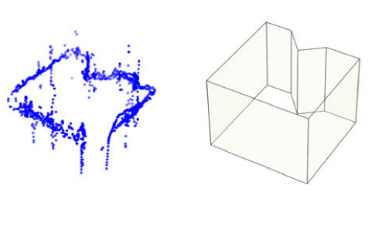
Associate Scientist and Ph.D. Candidate in Robotics functioning at the intersection of Embodied AI and AGI. My research focuses on Reasoning and Reinforcement Learning to develop intelligent agents capable of achieving breakthroughs for science and humanity. Grounded in cognitive robotics and frontier AI, I am actively exploring new paradigms to push the state of the art in general intelligence.


Research Focus
Embodied AI
Ph.D. Candidate
Reasoning & RL